|
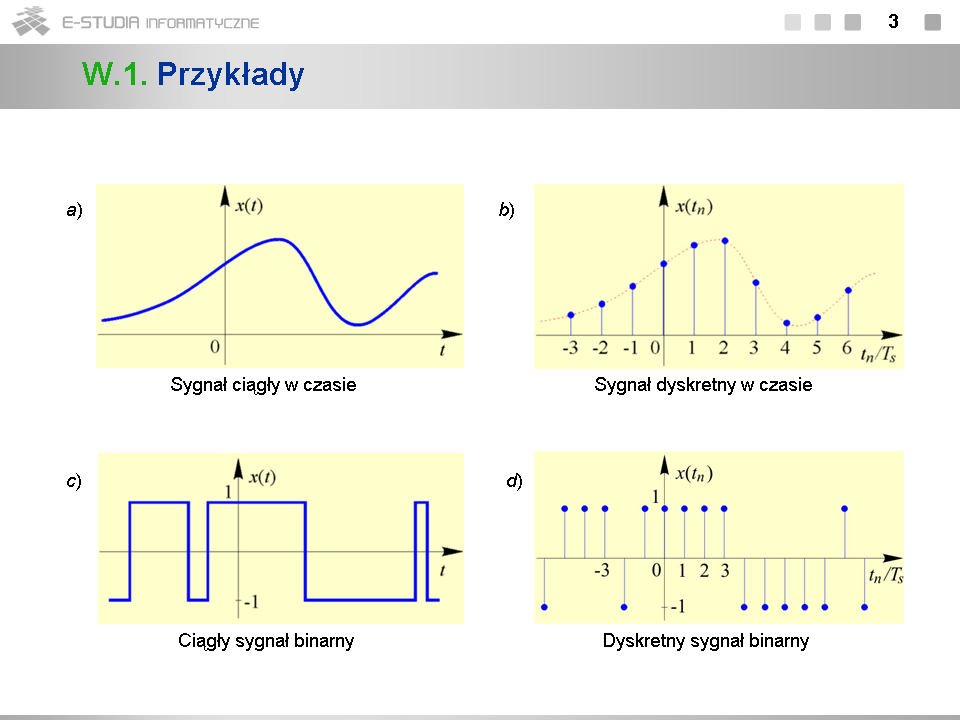
- Zwróćmy uwagę, że sygnały przedstawione na rys. b) i d) otrzymujemy w wyniku próbkowania sygnałów z rys. a) i odpowiednio c). Z sygnałami powstałymi w wyniku próbkowania sygnałów analogowych mamy w praktyce do czynienia najczęściej. Sygnałami dyskretnymi mogą być jednak także sygnały nie mające pierwowzorów analogowych, np. ciąg notowań dziennych kursu złotówki do dolara. Podkreślmy, że sygnał dyskretny jest w istocie rzeczy ciągiem liczb.
- Sygnały analogowe będziemy oznaczać ,zaś sygnały dyskretne - ,lub w przypadku próbkowania równomiernego w chwilach , W odniesieniu do tych ostatnich z reguły operuje się czasem bezwymiarowym, unormowanym względem okresu próbkowania . Oznacza się je wówczas symbolami lub , gdzie jest numerem próbki.
|














